数组
数组是线性表的扩展,其数据元素本身也是线性表。
数组的特点
- 数组中各元素都具有统一的类型
- 可以认为,d维数组的非边界元素具有d个直接前驱和d个直接后继
- 数组维数确定后,数据元素个数和元素之间的关系不再发生改变,适合于顺序存储。
- 每组有定义的下标都存在一个与其相对应的值
数组的基本操作定义
- 构造n维数组
- 销毁数组
- 取得指定下标的数组元素值
- 为指定下标的数组元素重新赋值
多维数组的通用操作
通过结构体对于结构体的维度以及每个维度的长度进行封装:
typedef struct{
ElemType * base
int dim;
int* bounds;
int* constans;
}Array;数组的顺序存储结构
一维数组
ElemType a[n]以基地址开始申请的连续n个空间,数组名a即为基地址
若要找到第 i 个元素:
a[i] = a + i * sizeof(ElemType);
二维数组
ElemType a[m][n];一般情况下,我们以第一个参数(m)为行,以第二个参数(n)为列。
在Pascal、c等语言中,对于二维数组的存取方式为以行为主序,将二维数组在内存中以一行为一个单位顺序存储。
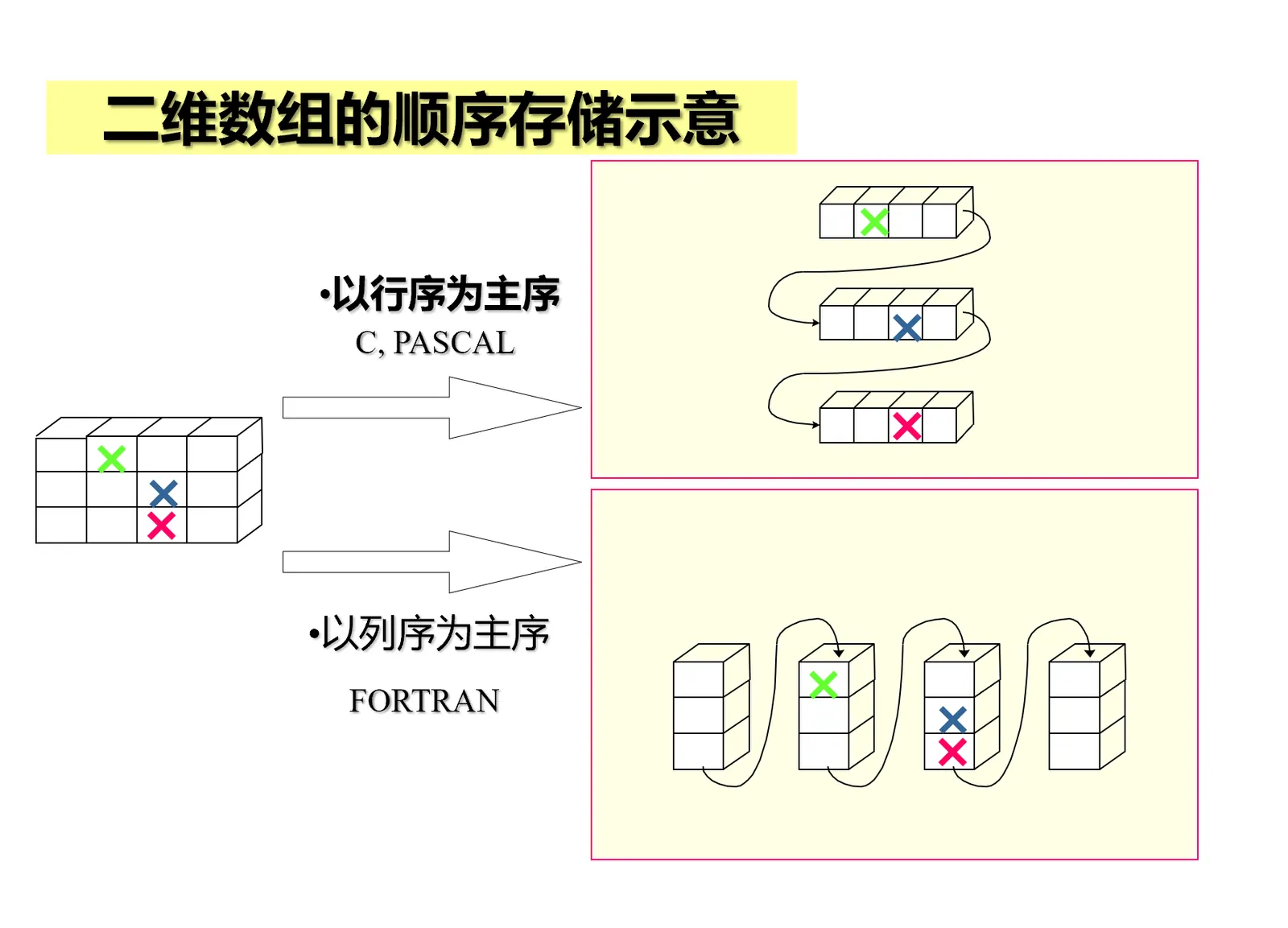
在以行为主序存储的二维数组中,若要找到a[i][j]:
a[i][j] = a + (i * n + j)*sizeof(ElemType)
矩阵的压缩存储
目的是节省空间
对称矩阵
特点:
A[i][j] = A[j][i]- 行数和列数相等即
n*n
存储方法:
我们只需要存储下/上三角(包括主对角线)的数据元素。对于一个n*n 的矩阵来说总共占用 n(n+1)/2 的空间。
| a[1][1] | a[2][1] | a[2][2] | …… | a[i][j] | …… | a[n][n] |
|---|
三角矩阵
特点:
- 行数和列数相等即
n*n - 主对角线以下/上的元素(不包括对角线)全部为一个常数c
存储方法:
重复元素c共享一个元素存储空间,共占用n(n+1)/2+1个元素空间
| c | a[1][1] | a[2][1] | a[2][2] | …… | a[i][j] | …… | a[n][n] |
|---|
带状矩阵(对角矩阵)
特点:
- 行数和列数相等即
n*n - 非零元素集中在主对角线及其两侧共L(奇数)条对角线的带状区域内——L对角矩阵
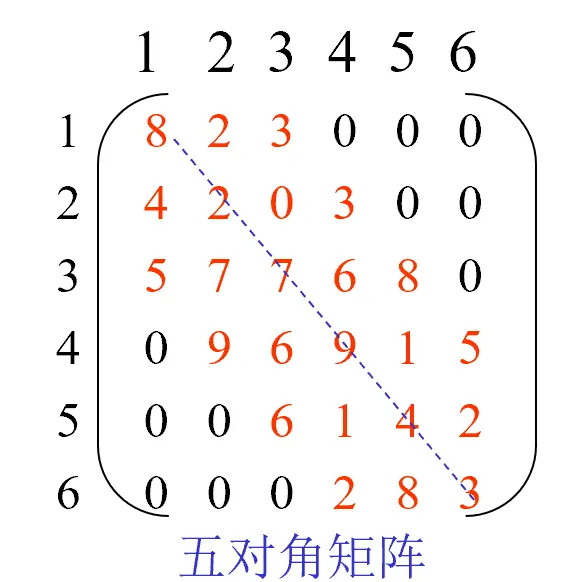
存储方法:
只存储带状区内的元素。除首行和末行,按每行L个元素,共 (n-2)L+(L+1)=(n-1)L+1 个元素。
- 首行+末行 = L+1
随机稀疏矩阵
特点:
- 大多数元素为零
常用存储方法:
- 记录每一非零元素(i,j,value)——虽然节省空间,但丧失随机存取功能
- 顺序存储:三元组表
- 链式存储:十字(正交)链表
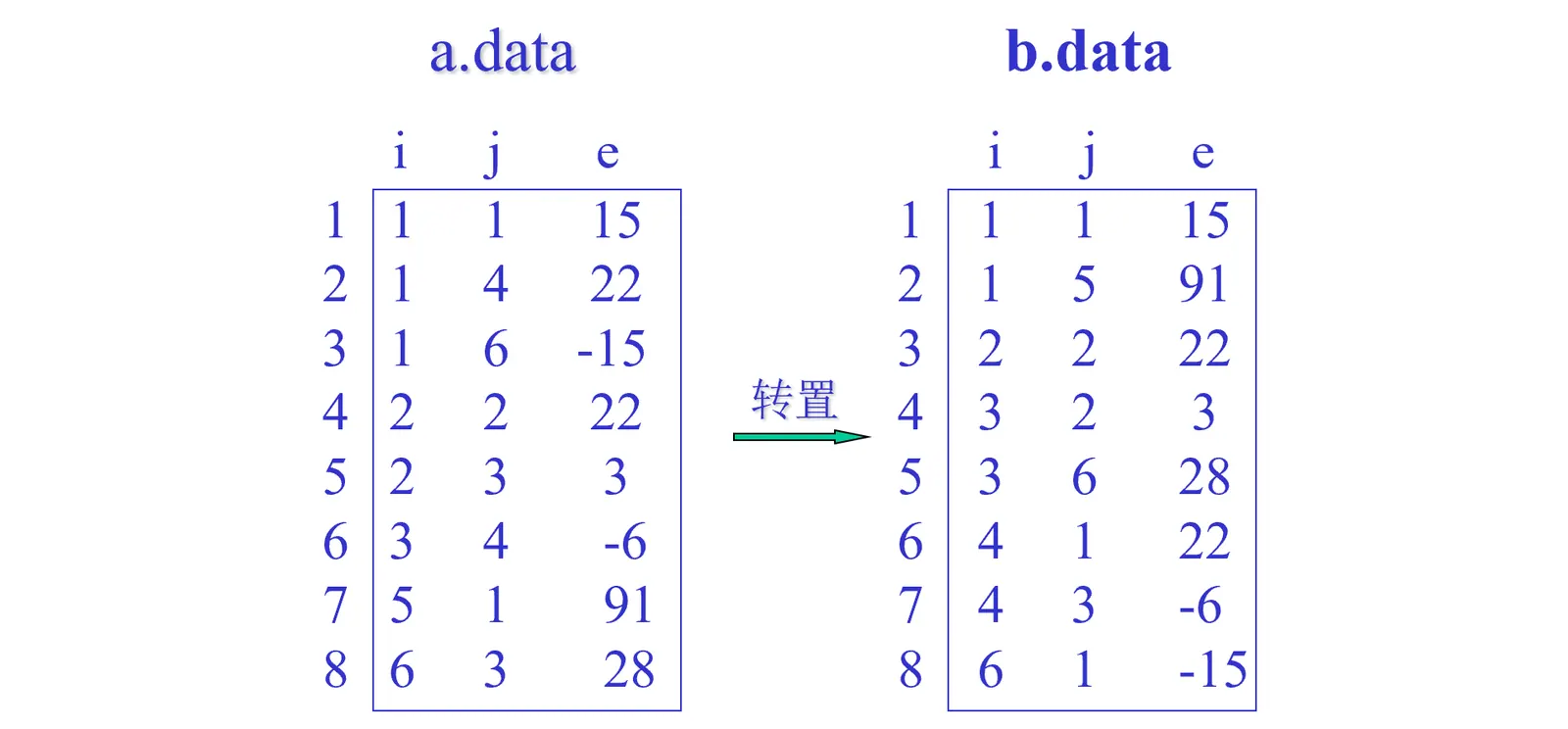
三元组表
#define MAXSIZE 1000 //设定非零元素最大值
typedef struct {
int i, j ;
ElemType e;
}Triple;
typedef struct {
Triple data[MAXSIZE+1]; //三元组表,data[0]未用
int mu, nu, tu; //行数、列数、非零元个数
}TSMatrix;
求转置矩阵
三元组表中,我们默认以行为主序进行存储,所以转置过后我们仍然需要维持三元组表的行主序原则。
算法一 O(n*t)
void TransMatrix(TSMatrix &b, TSMatrix a)
{
b.mu=a.nu; //b的行数等于a的列数
b.nu=a.mu; //b的列数等于a的行数
b.tu=a.tu; //b的非零元个数等于a的非零元个数
if (b.tu) //非零元素个数不为零
{
int q=1; //指示b中存放数据的位置,初值为1
for (int row=1; row<=b.mu; row++ ) //对b的每一行进行填充
for (int p=1; p<=a.tu; p++ ) //对a的每个三元组检查
if (a.data[p].j==row) { //找行号为row的三元组放入b中
b.data[q].i =a.data[p].j;
b.data[q].j =a.data[p].i;
b.data[q].e =a.data[p].e;
q++; //修正q值
}
}
} //TransMatrix快速转置法 O(n+t)
bool FastTransMatrix(TSMatrix &b, TSMatrix a)
{
b.mu=a.nu, b.nu=a.mu, b.tu=a.tu;
int num[a.nu+1] = {0}, //num存放矩阵a中每一列的非零元个数
cpot[a.nu+1], //cpot存放矩阵a中每列的第一个非零元素在b中的位置
col, t, p, q;
if( b.tu )
{
for (t=1; t<=a.tu; ++t)
++num[a.data[t].j]; //统计a中每列有几个非零元素
cpot[1]=1; //a中第一列第一个元素在b中位置为1
for ( col=2; col<=a.nu; ++col )
cpot[col]=cpot[col-1]+num[col-1]; //上一列的第一个元素在b中的位置+上一列的元素个数 = 这一列第一个元素在b中的位置
for ( p=1; p<=a.tu; ++p )
{ //对a.tu个非零元素转置
col=a.data[p].j; //获取当前元素的列
q=cpot[col]; //获取当前列第一个元素在b中的位置
//放入对应位置
b.data[q].i =a.data[p].j;
b.data[q].j =a.data[p].i;
b.data[q].e =a.data[p].e;
//由于第一个位置已经被占用,下一个该列的元素放在下一个位置上
++cpot[col] ;
}
}
return trus;
}//FastTransMatrix行逻辑链接的表
typedef struct {
Triple data[MAXSIZE+1];
int rpos[MAXRC+1];
int mu, nu, tu;
}RLSMatrix;
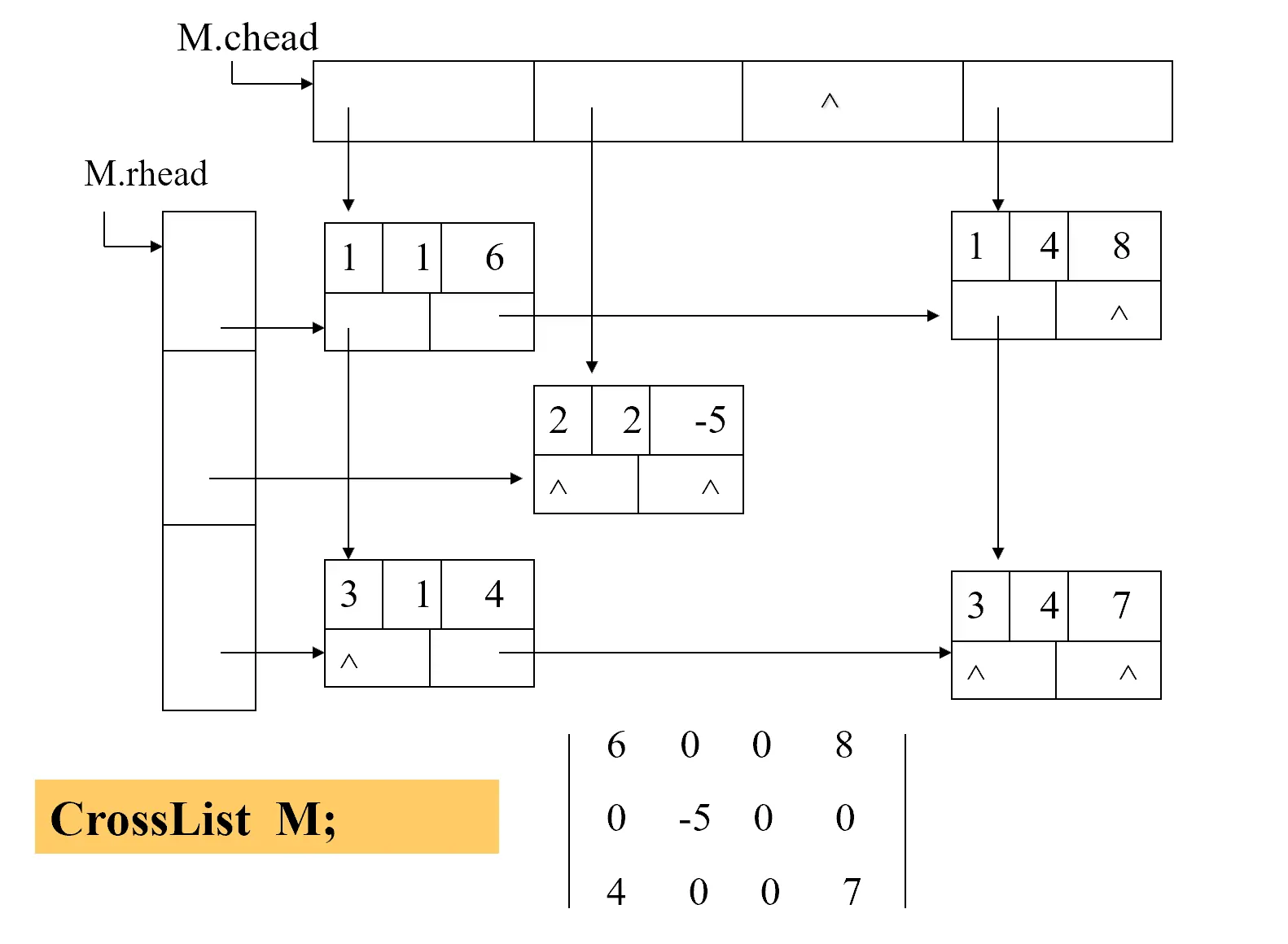
十字(正交)链表
typedef struct OLNode
{
int i, j ;
ElemType e;
struct OLNode * right, * down;
}OLNode, * OLink;
typedef struct {
OLink * rhead, * chead;
int mu, nu, tu;
}CrossList;
示意图:
广义表(列表)的定义和表示方法
广义表是由零个或多个原子或者子表组成的有限序列。
- 原子:逻辑上不能再分解的元素。
- 子表:作为广义表中元素的广义表。
广义表中的元素全部为原子时即为线性表。线性表是广义表的特例,广义表是线性表的推广。
相关术语
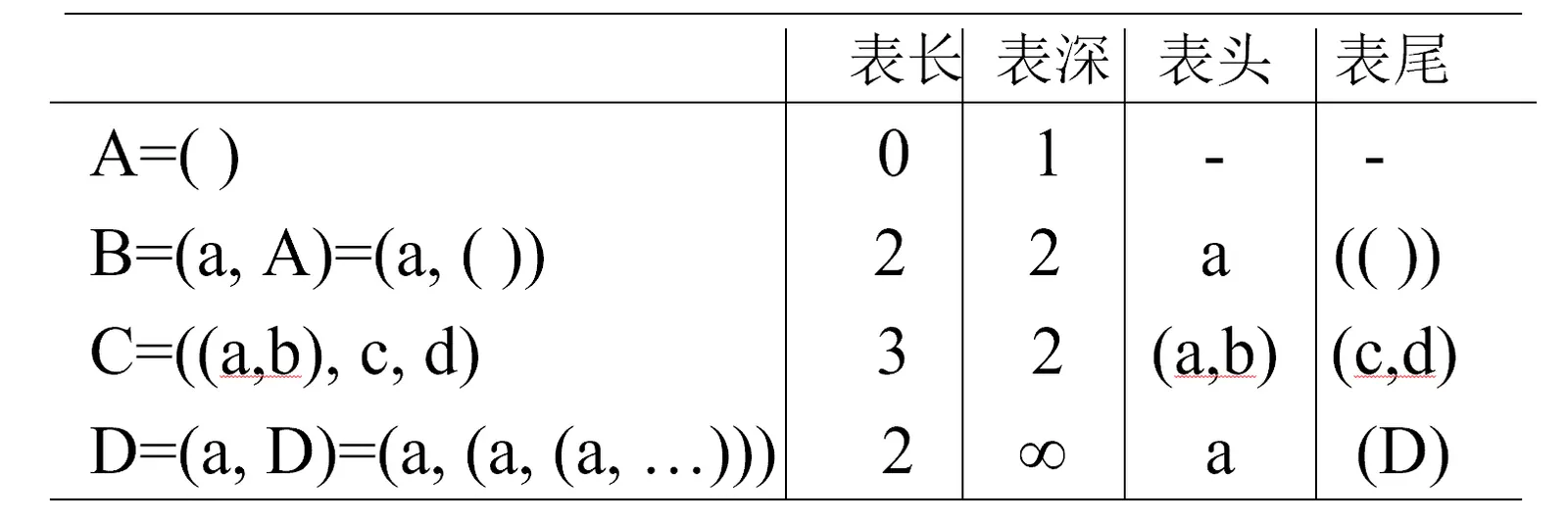
- 表的长度:表中的元素(第一层)个数。
- 表的深度:表中元素的最深嵌套层数。
- 表头:表中的第一个元素。
- 表尾:除第一个元素外,剩余元素构成的新广义表。
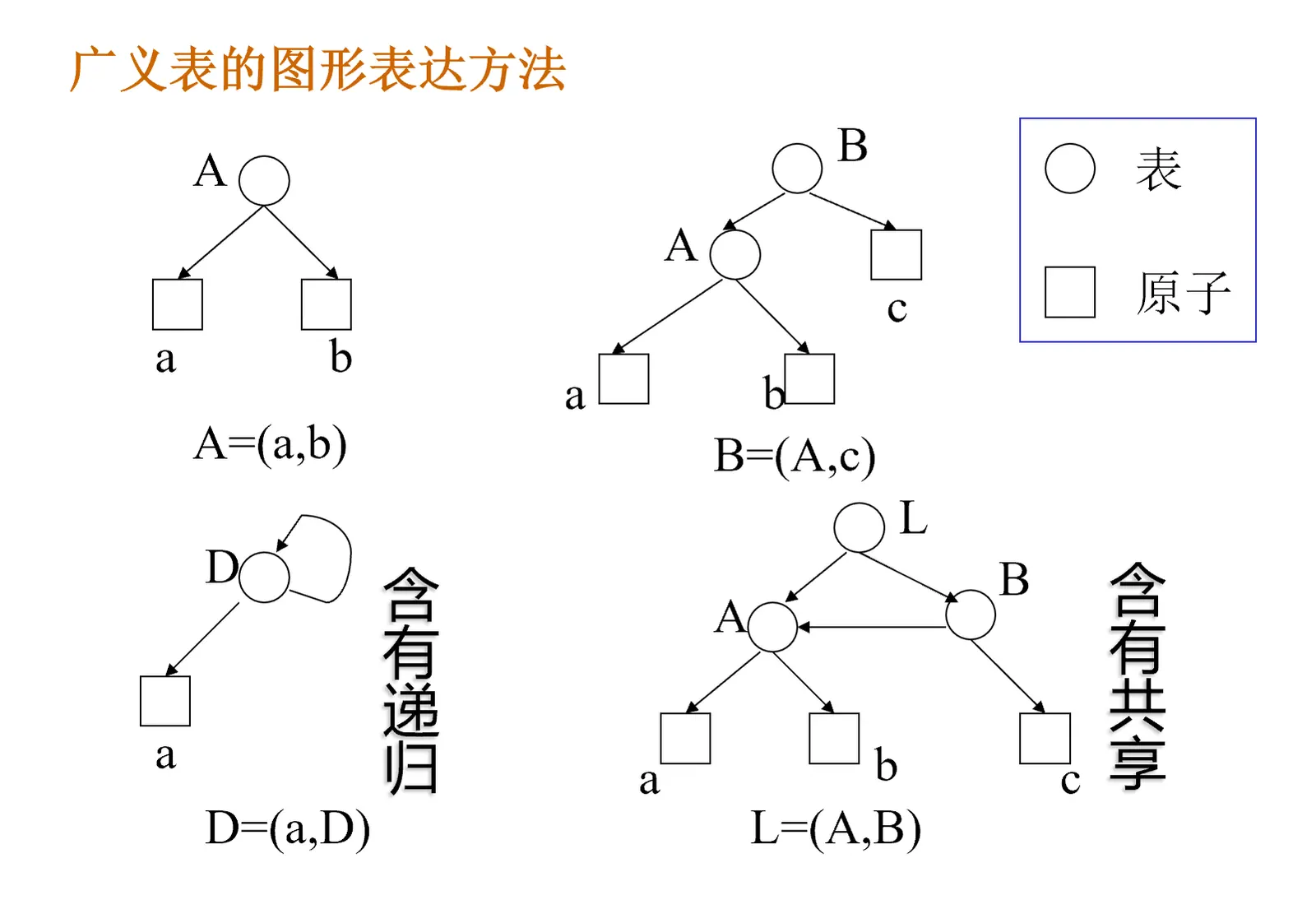
图形表示法
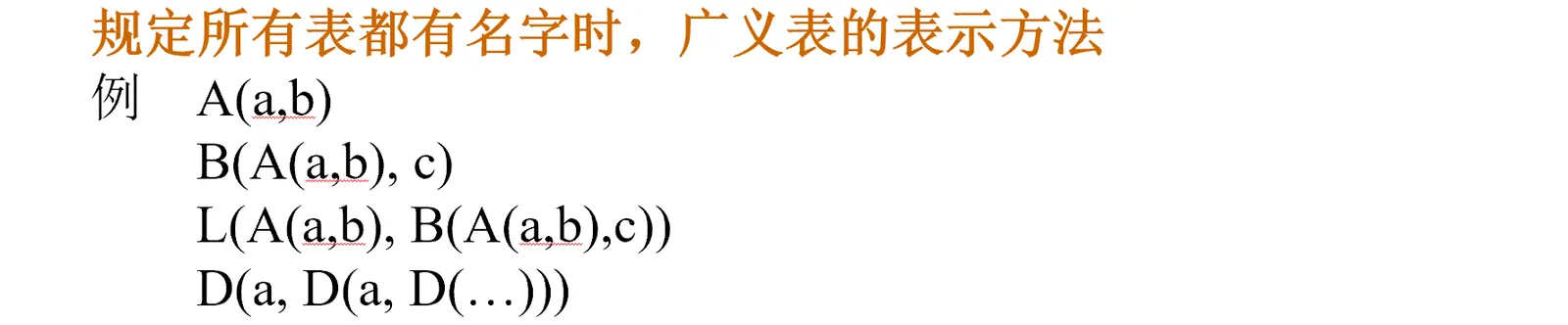
表示方法
广义表结构的分类
- 纯表:与树型结构对应的广义表。
- 再入表:允许结点共享的广义表。
- 递归表:允许递归的广义表。
递归表>再入表>纯表>线性表。
基本操作
-
结构的创建和销毁

-
状态函数

-
插入和删除操作

-
遍历

广义表的存储结构
头尾链表形式
typedef enum {ATOM, LIST} ElemTag;
// ATOM==0:原子;LIST==1:子表
typedef struct GLNode{
ElemTag tag;
union {
AtomType atom;
struct {
struct GLNode *hp, *tp;
}ptr;
}
} * GList1;-
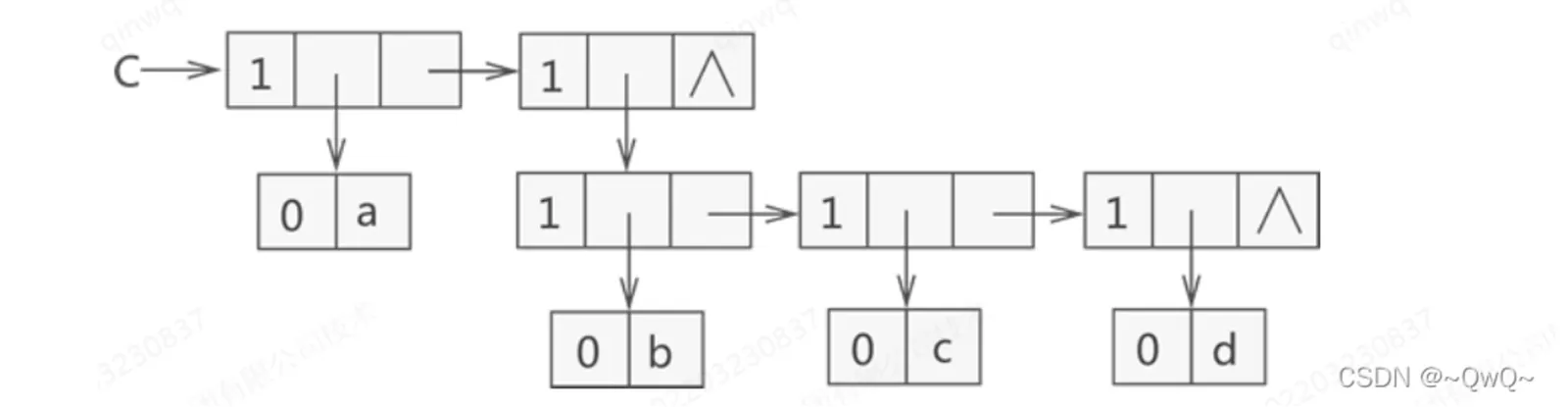
tag = 1 为表结点
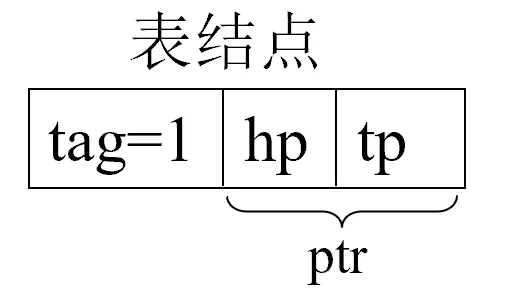
-
tag = 0 为原子结点
存储结构示意图:{a,{b,c,d}}
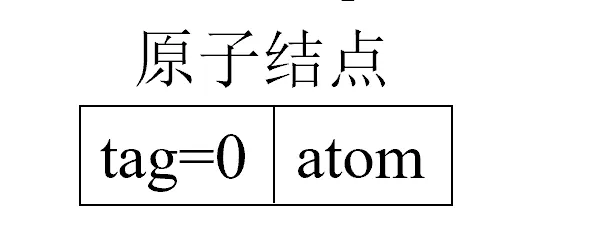
扩展的线性链表形式
typedef enum {ATOM, LIST} ElemTag;
// ATOM==0:原子;LIST==1:子表
typedef struct GLNode{
ElemTag tag;
union {
AtomType atom;
struct {
struct GLNode *hp;
}
}
struct GLNode *tp;
} * GList2;
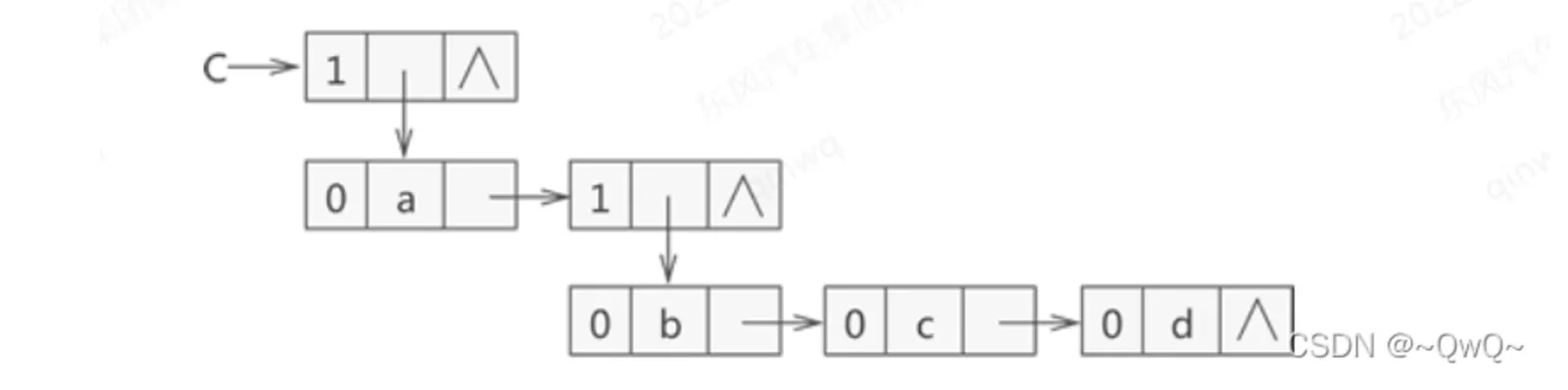
存储结构示意图:{a,{b,c,d}}
广义表的递归算法
广义表的特点:定义是递归的。
递归求广义表的深度
方法一:分析表中各元素
int GListDepth(GList1 L)
{ if (!L) return 1; //空表
if (L->tag==ATOM) return 0; //单原子
for (max=0, pp=L; pp; pp=pp->ptr.tp) { //遍历该广义表的每一个元素,取最大深度
dep=GListDepth (pp->ptr.hp);
if (dep>max) max=dep;
}
return max+1;
}//GListDepth
方法二:分析表头和表尾
int GListDepth(GList1 L)
{ if (!L) return 1; //空表
if (L->tag==ATOM) return 0; //单原子
dep1=GListDepth (L->ptr.hp)+1; //计算当前表头的深度
dep2=GListDepth (L->ptr.tp); //计算表尾组成的新表的深度,无需+1。
if (dep1>dep2) return dep1;
else return dep2;
}//GListDepth
总感觉这里有点像孩子兄弟二叉树??hp结点指向孩子,tp结点指向下一个兄弟
复制广义表
Status CopyGList(GList1 &T, GList1 L)
{ if (!L) T=NULL; //复制空表
else {
T=(GList1)malloc(sizeof(GLNode));
if (!T) exit(OVERFLOW);
T->tag=L->tag;
if (L->tag==ATOM) T->atom=L->atom; //复制单原子
else {
CopyGList(T->ptr.hp, L->ptr.hp);//复制表头
CopyGList(T->ptr.tp, L->ptr.tp);//复制表尾
}
}
return OK;
}//CopyGList
对于一个广义表,组成部分只有两部分,表头和表尾。所我们只需要不断的递归复制表头和表尾即可。
对于表头可能是
- 子广义表
- 单原子
对于表尾则一定是广义表:
- 非空广义表
- 空广义表
所以停止递归的条件有两个:
- 表头是一个单原子
- 表头/表尾是一个空表
本章学习要点
最后附上本章学习要点: