动手学习深度学习————多层感知机
在过去几年里,深度学习给世界带来惊喜,推动了计算机视觉、自然语言处理、自动语音识别、强化学习和统计建模等领域的快速发展。
感知机
给定输入x,权重w,和偏移b,感知机输出:
$$
o = \sigma \left( \langle \mathbf{w}, \mathbf{x} \rangle + b \right)
$$
$$
\sigma(x) = \begin{cases} 1 & \text{if } x > 0 \ -1 & \text{otherwise} \end{cases}
$$
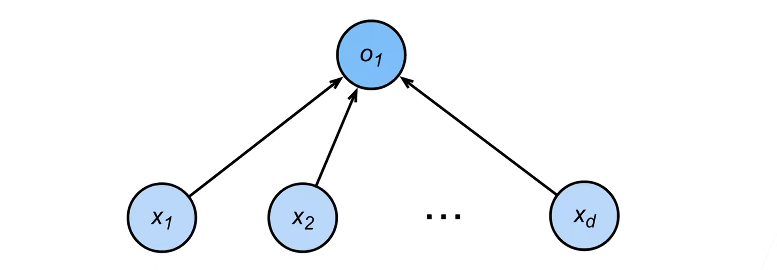
这是一个二分类的问题:输出1/-1
- 回归问题:输出一个实数;而二分类问题输出一个类别
- Softmax回归:多分类问题,输出概率
感知机的训练算法
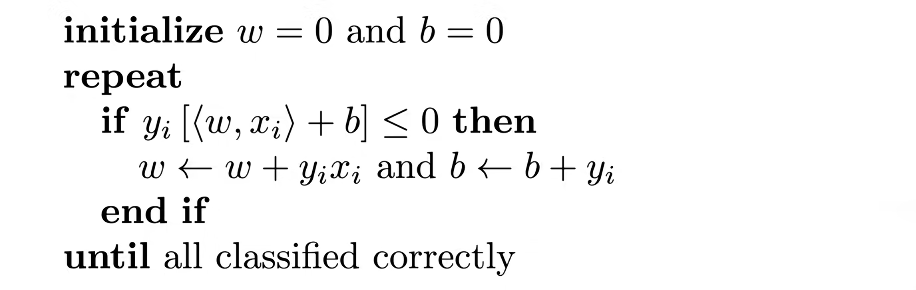
初始化:将权重向量$w$和偏置$b$都初始化为0。
循环:算法会不断循环遍历训练数据,直到所有的样本都被正确的分类。
判断错误分类:
$$
y_i [\langle w, x_i \rangle + b] \leq 0
$$
- 这里的$y_i$是真实的标签(为+1或-1)
- $\langle w, x_i \rangle + b$ 是模型对样本$x_i$的预测输出值
- 含义:如果$y_i$和预测值的符号相反(乘积为负),或者预测值为0,说明分类错误。
更新规则:
$$
w \leftarrow w + y_i x_i
$$
$$
b \leftarrow b + y_i
$$
- 含义:当发现一个错误样本时,利用该样本的信息来调整权重。
- 如果是正样本($y=1$)被误判为负,就加上$x$(让$w$向$x$的方向靠近)
- 如果是负样本($y=-1$)被误判为正,就减去$x$(让$w$远离$x$)
更新规则的数学逻辑:
感知机的预测完全取决于内积 $\langle w, x \rangle$ 的正负(为了简化,我们先忽略偏置 $b$)。
当 $y=1$(正样本)被误判:此时目前的 $\langle w, x \rangle \le 0$。我们希望这个值 变大 (最好变成正数)。如果我们更新 $w_{new} = w + x$,那么新的内积为:
$$
\langle w+x, x \rangle = \langle w, x \rangle + \langle x, x \rangle = \langle w, x \rangle + |x|^2
$$因为 $|x|^2$ 永远是正数,所以更新后的内积 一定会增加 。这让该样本在下次预测时更趋向于被判定为正。
当 $y=-1$(负样本)被误判:此时目前的 $\langle w, x \rangle \ge 0$。我们希望这个值变小(最好变成负数)。如果我们更新 $w_{new} = w - x$,新的内积为:
$$
\langle w-x, x \rangle = \langle w, x \rangle - |x|^2
$$内积一定会减小,从而让该样本更趋向于被判定为负。
优化视角解释
以上的感知机训练算法,等价于使用批量大小为1的梯度下降,并使用如下的损失函数:
$$
\ell(y, \mathbf{x}, \mathbf{w}) = \max(0, -y\langle \mathbf{w}, \mathbf{x} \rangle)
$$
理解这个公式:
- 如果分类正确:$y\langle \mathbf{w}, \mathbf{x} \rangle > 0$,那么 $-y\langle \mathbf{w}, \mathbf{x} \rangle < 0$,经过 $\max(0, \dots)$ 后损失为 0 。此时梯度为 0,参数 不更新 。
- 如果分类错误: $y\langle \mathbf{w}, \mathbf{x} \rangle < 0$**,那么 **$-y\langle \mathbf{w}, \mathbf{x} \rangle > 0$,损失为正。
更新规则:当分类错误时,损失函数对 $w$ 求导(梯度)是 $-yx$。
代入 SGD 更新公式(假设学习率为 1):
$$
w_{new} = w_{old} - \text{learning_rate} \times \text{gradient}
$$
$$
w_{new} = w_{old} - 1 \times (-yx) = w_{old} + yx
$$
感知机收敛定理
- 数据半径 $r$ :假设所有的输入数据 $x$ 都分布在一个半径为 $r$ 的圆(或高维球体)内。即数据的大小(范数)是有界的。
- 余量 $\rho$ (Margin) :这代表了正负两类样本之间“最宽”的那条缝隙。
感知机的步数上限:
$$
\text{最大步数} \le \frac{r^2 + 1}{\rho^2}
$$
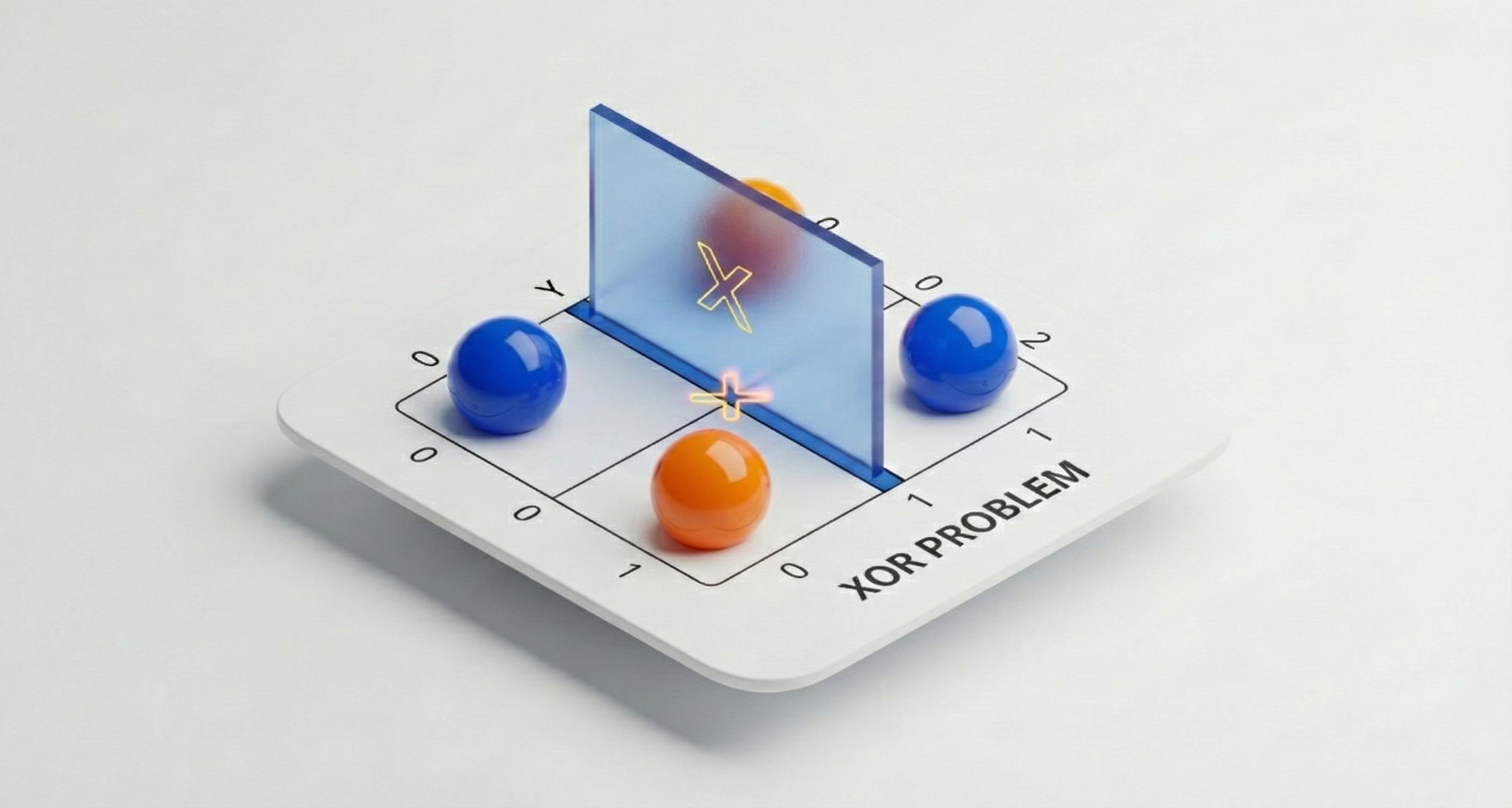
感知机的问题
感知机不能拟合XOR函数,它只能产生线性分割面。导致了第一次AI的寒冬。
XOR问题:无法使用一条直线,将两种颜色的球完全分开。
多层感知机
上面我们提到单层感知机模型无法解决非线性问题,而引入隐藏层可以解决这一问题。
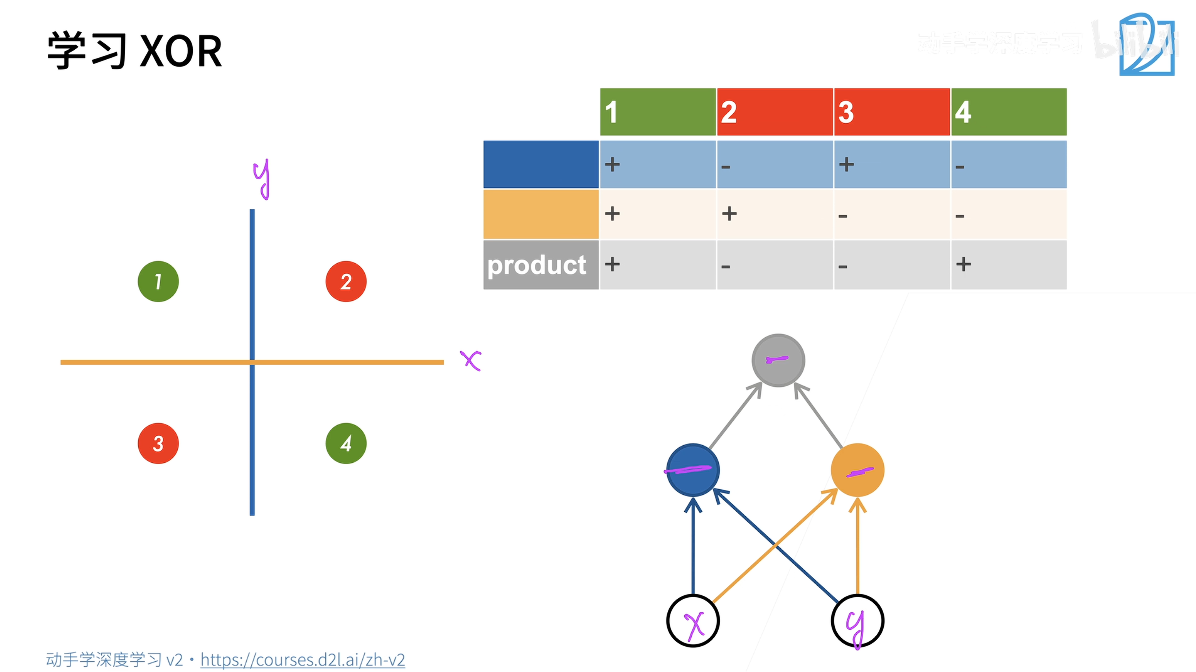
在这个问题中,隐藏层相当于两条辅助线,这就好比我们在做特征工程,我们将原始复杂的分类任务拆解成了两个简单的子任务:
- 蓝色特征:
- 网络学会的第一条规则是区分左右(即x轴的符号)
- 左边为 + ,右边为 - ,这对应图中的蓝色竖线
- 黄色特征:
- 网络学会的第二条规则是区分上下(即y轴的符号)
- 上边为 + , 下边为 - ,这对应了图中的黄色横线。
现在,我们有了两个新的特征(蓝色和黄色)。神经网络的输出层(Output Layer)所做的工作,就是将这两个特征进行 非线性组合 (在这里可以理解为乘法或异或逻辑):
$$
公式逻辑:Product = Blue × Yellow
$$
对应到神经网络架构,这就是一个最简单的多层感知机(MLP):
- 输入层(x, y):也就是原始数据的坐标。
- 隐藏层:这里有两个神经元:
- 一个负责学习蓝色规则
- 一个负责学习黄色规则
- 输出层:接收隐藏层信号,完整最终的逻辑判断
单隐藏层
- 隐藏层的大小是一个超参数。
输入输出的大小都是由数据和类别决定的。
单分类
核心组件
单分类指输出为一个标量的情况。
输入层:
- $\mathbf{x} \in \mathbb{R}^n$:代表输入是一个n维向量。
隐藏层:
- $\mathbf{W}_1 \in \mathbb{R}^{m \times n}$:这是第一层的权重矩阵。它将n维输入映射到m维空间。
- $\mathbf{b}_1 \in \mathbb{R}^m$:偏置项,对应隐藏层的m个神经元。
输出层:
- $\mathbf{w}_2 \in \mathbb{R}^m, b_2 \in \mathbb{R}$:单输出的情况,$\mathbf{w}_2$是一个一维向量。
数学表达式
- 隐藏层计算:
$$
\mathbf{h} = \sigma(\mathbf{W}_1\mathbf{x} + \mathbf{b}_1)
$$
- 这里先进行线性变换$\mathbf{W}_1\mathbf{x} + \mathbf{b}_1$
- $\sigma$(激活函数):按元素做运算的函数。后续细讲。
- 输出层计算:
$$
o = \mathbf{w}_2^T \mathbf{h} + b_2
$$
- 这是将隐藏层提取到的特征h进行加权求和,得到最终的预测值。
激活函数 Activation function
激活函数通过计算加权和并加上偏置来确定神经元是否应该被激活,它们将输入信号转换为输出的可微运算。大多数激活函数都是非线性的。 由于激活函数是深度学习的基础。
为什么需要激活函数
简单来说,如果没有激活函数,再深的网络也只是一层。
假设我们有一个两层的神经网络,但没有激活函数。
- 第一层输出:$\mathbf{h} = \mathbf{W}_1 \mathbf{x} + \mathbf{b}_1$
- 第二层输出:$\mathbf{o} = \mathbf{W}_2 \mathbf{h} + \mathbf{b}_2$
我们将第一层代入第二层:
$$
\mathbf{o} = \mathbf{W}_2 (\mathbf{W}_1 \mathbf{x} + \mathbf{b}_1) + \mathbf{b}_2
$$
$$
\mathbf{o} = (\mathbf{W}_2 \mathbf{W}_1) \mathbf{x} + (\mathbf{W}_2 \mathbf{b}_1 + \mathbf{b}_2)
$$
如果我们令 $\mathbf{W}_{new} = \mathbf{W}_2 \mathbf{W}_1$ 且 $\mathbf{b}_{new} = \mathbf{W}_2 \mathbf{b}_1 + \mathbf{b}_2$,那么公式就变成了:
$$
\mathbf{o} = \mathbf{W}{new} \mathbf{x} + \mathbf{b}{new}
$$
结论: 无论你堆叠多少层,只要是线性的,它们最终都可以合并成一个单一的线性层。这意味着你的“深度”网络在表达能力上和最简单的感知机没有任何区别,无法处理复杂的任务。
激活函数的作用:它像一个”开关”或”过滤器”,决定了神经元的哪些信息应该传递到下一层。它引入了非线性,让网络能够拟合出复杂的边界。
- 万能近似定理:只要神经网络拥有至少一个包含足够多神经元的隐藏层,并配合非线性激活函数,它就可以以任意精度拟合闭区间内的连续函数。
常见的激活函数
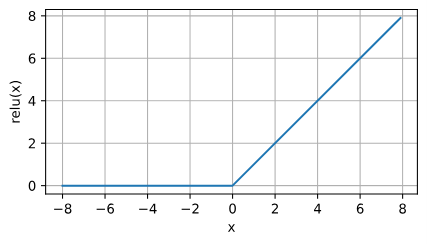
ReLU函数
修正线性单元(Rectified linear unit, ReLU),这是最受欢迎的激活函数。
$$
\text{ReLU}(x) = \max(x, 0)
$$
ReLU导数的图像:
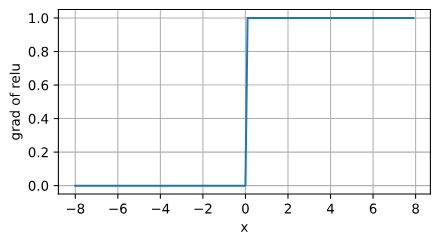
注意:当输入值精确等于0时,ReLU函数不可导。在此时,我们默认使用左侧的导数。我们可以忽略这种情况,因为输入可能永远都不会是0。 这里引用一句古老的谚语,“如果微妙的边界条件很重要,我们很可能是在研究数学而非工程”, 这个观点正好适用于这里。
优点:
- 实现简单。
- 无需计算指数,计算速度快。
- 求导表现好
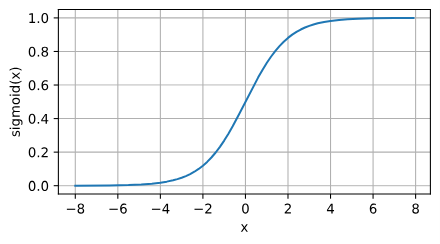
sigmoid函数
sigmoid函数将输入变换为区间(0, 1)上的输出。
$$
\text{sigmoid}(x) = \frac{1}{1 + \exp(-x)}.
$$
sigmoid函数的导数:
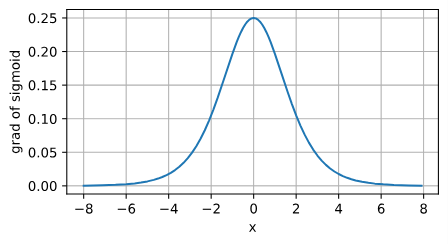
针对梯度下降的学习时,sigmoid是一个自然的选择,因为他是一个平滑的、可微的阈值单元近似。然而,sigmoid在隐藏层中已经较少使用, 它在大部分时候被更简单、更容易训练的ReLU所取代。
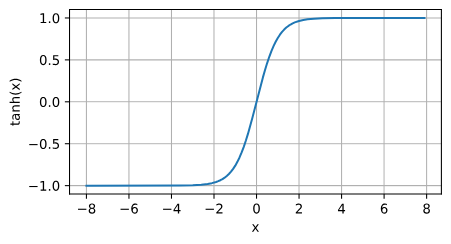
tanh函数
与sigmoid函数类似, tanh(双曲正切)函数也能将其输入压缩转换到区间(-1, 1)上。 tanh函数的公式如下:
$$
\tanh(x) = \frac{1 - \exp(-2x)}{1 + \exp(-2x)}.
$$
tanh函数的导数:
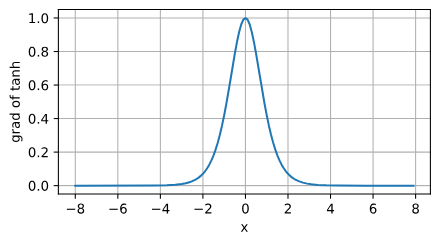
tanh函数和sigmoid函数计算都比较复杂,在深度学习中算力是宝贵的资源,所以一般情况下都选择使用ReLU函数。
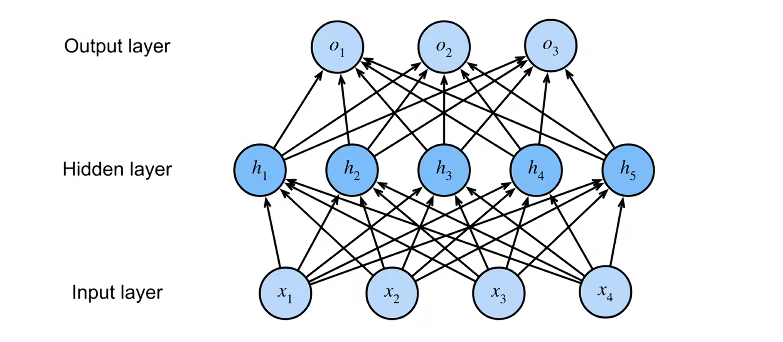
多类分类
$$
y_1, y_2, \dots, y_k = \text{softmax}(o_1, o_2, \dots, o_k)
$$
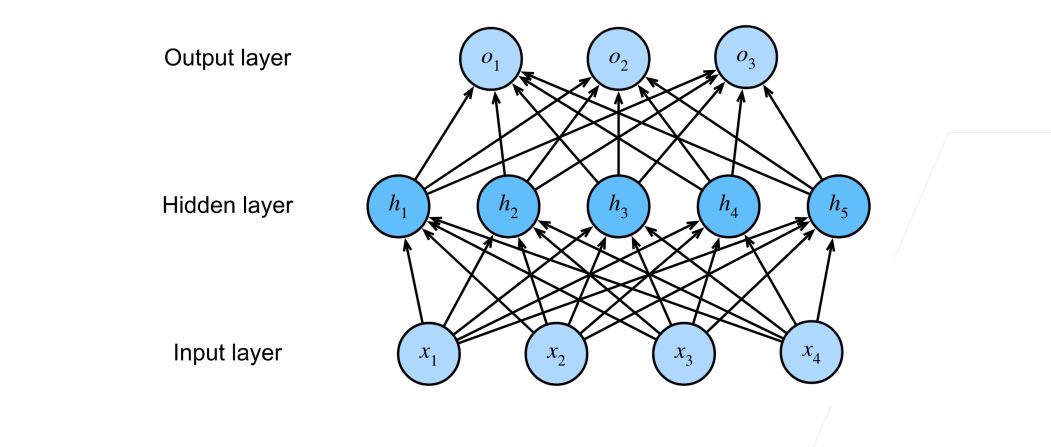
输入层:$\mathbf{x} \in \mathbb{R}^n$
隐藏层:$ \mathbf{W}_1 \in \mathbb{R}^{m \times n}, \mathbf{b}_1 \in \mathbb{R}^m$
输出层:$ \mathbf{W}_2 \in \mathbb{R}^{m \times k}, \mathbf{b}_2 \in \mathbb{R}^k$
这里$\mathbf{W}_2$不再是一个向量,而是一个矩阵$\mathbb{R}^{m \times k}$。它把m维的隐藏特征映射到k个类别的评分上。
计算公式:
- 隐藏层激活:
$$
\mathbf{h} = \sigma(\mathbf{W}_1 \mathbf{x} + \mathbf{b}_1)
$$
- 输出层线性变换:
$$
\mathbf{o} = \mathbf{W}_2^T \mathbf{h} + \mathbf{b}_2
$$
- 最终输出:
$$
\mathbf{y} = \text{softmax}(\mathbf{o})
$$
多类分类与softmax回归没有本质区别,只是增加了隐藏层。
多隐藏层
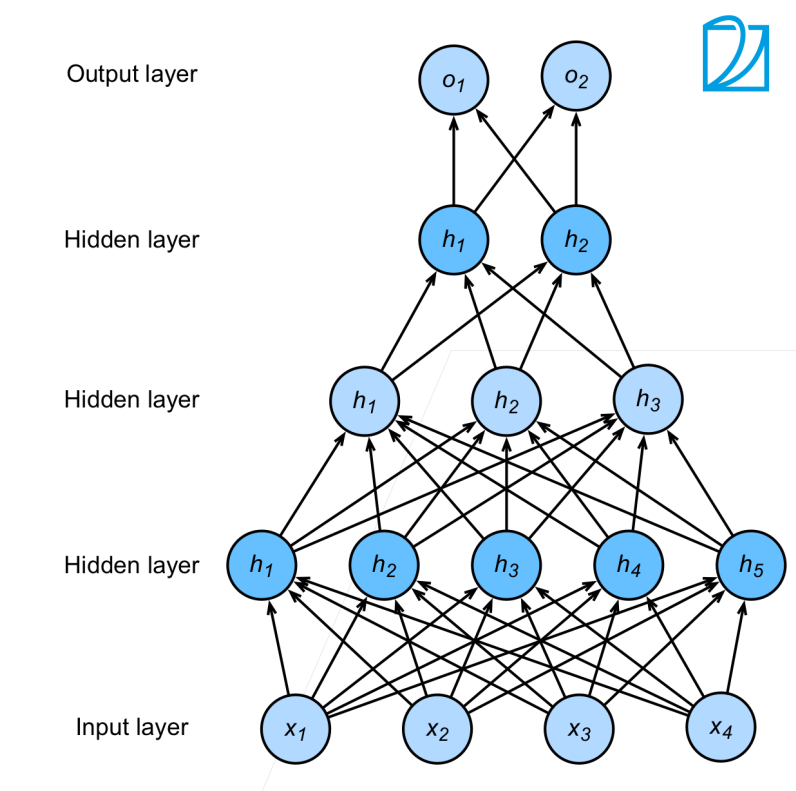
计算公式:
$$
\begin{aligned}
\mathbf{h}_1 &= \sigma(\mathbf{W}_1 \mathbf{x} + \mathbf{b}_1) \
\mathbf{h}_2 &= \sigma(\mathbf{W}_2 \mathbf{h}_1 + \mathbf{b}_2) \
\mathbf{h}_3 &= \sigma(\mathbf{W}_3 \mathbf{h}_2 + \mathbf{b}_3) \
\mathbf{o} &= \mathbf{W}_4 \mathbf{h}_3 + \mathbf{b}_4
\end{aligned}
$$
针对多层感知机,我们需要设计其中的超参数:
- 隐藏层数
- 每层隐藏层的大小